
ブラシレスモーターとは ~矩形波駆動の原理~
ブラシ付きモーター、ブラシレスモーターという言葉自体を聞いたことがある人も多いと思います。
一定以上の大きさのドローンでは通常ブラシレスモーターが使用されますが、ブラシがある場合と無い場合で構造として何が違うのか、また駆動原理について説明していきます。
1. 【ブラシ付きモーターとブラシレスモーターの違い】
《ブラシ付きモーターとは》
ミニ四駆でもお馴染みのモーターで、ブラシと呼ばれる電極を整流子(湾曲した金属片)に接触させ、コイルに電流を流します。
整流子はコイル、軸とともに回転して、接触する整流子が機械的に切り替わることにより、通電するコイルも変わります。コイルが回転するので、永久磁石は回転させません(固定子)。
直流電源を接続するだけで回転し、また端子の+とーを入れ替えるだけで逆転するため、使い勝手が良い側面はありますが、「接点がある」ためノイズが発生しやすく、寿命も短いです。
《ブラシレスモーターとは》
ブラシ付きモーターを進化させたもので、トランジスタをON/OFFさせることにより、電気的に通電させるコイルを切り替えます。
高回転まで対応可能で、またブラシや整流子のような機械的接点が無いため長寿命です。
コイルが固定子、永久磁石が回転子で、ブラシ付きモーターとは逆の構成のため、通電対象であるコイルに摩擦が発生しないのがポイントです。
2. 【矩形波駆動の原理】
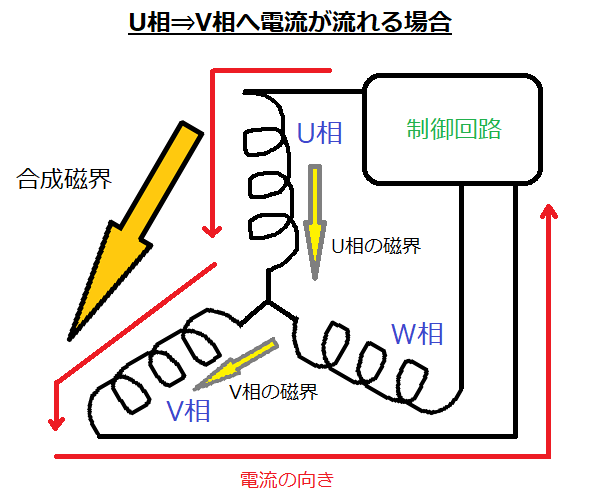
基本的な3相タイプを例にすると、U, V, W相の3つのコイルに対して、
U⇒V相、U⇒W相、V⇒W相、V⇒U相、W⇒U相、W⇒V相の順番で、図のように通電させるコイルと方向を切り替えていきます。
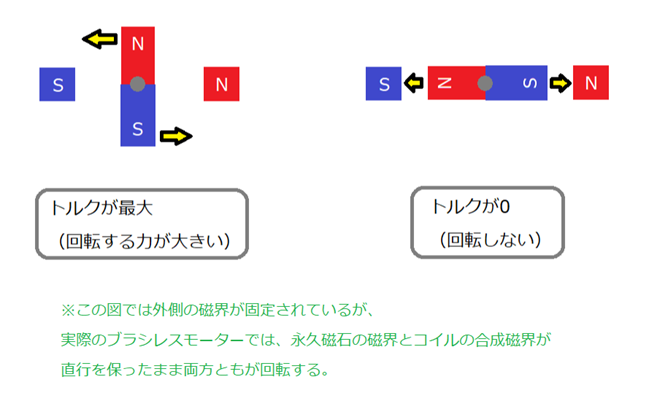
1つ切り替えることで合成磁界の向きは60°変化し、この全6パターンでローターは1周します。これらの切り替えは、合成磁界と磁石による磁界の向きが常に直行を保てるタイミングで行うのが最も効率的です。
図のように、磁界が直行しているときに、引き合う力を最も効率良く回転する力に変換できるため、トルクが最大となり、平行のときに0となるためです。
このようなタイミングで切り替えを行うためには、回転子と永久磁石の相対的な位置を把握する必要がありますが、ホール効果(物質に流れる電流に対して磁場をかけると、起電力が現れる現象)を利用した素子をコイル間に等間隔に配置したり、誘起電圧を測定することで位置検出をします。
ここで誘起電圧とは、コイルを貫く磁束の時間変化率の大きさに比例して、コイル両端に発生する電圧のことです(ファラデーの法則)。
誘起電圧を測定する場合、モーター端子に駆動電圧を与えている箇所では誘起電圧が埋もれてしまい測定出来ないため、駆動電圧を与えていないコイルで都度測定します。
しかし、コイルは電流を流そうとしても逆起電力(誘起電圧)が発生し、電圧に対して電流の位相が遅れるため、電流の位相遅れを見越して電圧印加のタイミングを早める必要があります(進角制御)。
遅れる位相も常に一定にはならず、周波数が高いほどコイルのインピーダンスが増加し、インダクタとしての成分が現れやすくなってくるため、位相遅れは大きくなります。
3. 【誘起電圧】
回転数が増加するほどトルクが減少するのも、誘起電圧が関わっています。
回転数が増加すると、コイルを貫く磁束の変化率が大きくなり、誘起電圧が増加します。すると、印加電圧に占める誘起電圧の割合が増加し、電流を流すのに使用できる電圧が低下するため電流が小さくなります。電流が小さいと磁場は弱くなるため、結果としてトルクは減少します。
逆に、負荷(必要トルク)が大きくなれば、その分最高回転数も減少すると言うこともできます。
このように、誘起電圧は進角制御、回転数とトルクの関係、回転位置検出と、モーターとは切っても切り離せない関係にあります。
以上です。
最後まで読んでいただき、ありがとうございました。
執筆:開発部T